Lojistik Regresyon#
Lojistik regresyon, en uygun ağırlıklar ile sabit terimi (bias) öğrenerek iki sınıfa ait olasılıkları döndüren bir ikili sınıflandırma modelidir.
# import numpy as np
import autograd.numpy as np
from autograd import grad
from autograd import elementwise_grad as egrad
%matplotlib inline
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
import sklearn.datasets as skdatasets
from celluloid import Camera
import scienceplots
from IPython.display import Image
np.random.seed(0)
plt.style.use(["science", "no-latex"])
Eğitim Veri Kümesi#
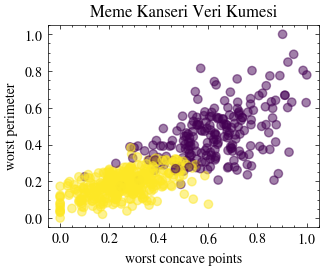
Meme kanseri veri kümesini içe aktaralım. Lojistik regresyon, tümörün ortalama çevresi ve ortalama yarıçapını kullanarak ikili sınıflandırma yapacak.
dataset = skdatasets.load_breast_cancer()
features_used = [-3, -8]
X = dataset.data[:, features_used]
feature_names = dataset.feature_names[features_used]
# min-max normalize the features along the columns
X_min_vals = X.min(axis=0)
X_max_vals = X.max(axis=0)
X = (X - X_min_vals) / (X_max_vals - X_min_vals)
Y = dataset.target
target_names = dataset.target_names
fig = plt.figure()
ax = fig.add_subplot()
ax.scatter(X[:, 0], X[:, 1], c=Y, alpha=0.5)
ax.set_xlabel(feature_names[0])
ax.set_ylabel(feature_names[1])
ax.set_title("Meme Kanseri Veri Kümesi")
Text(0.5, 1.0, 'Meme Kanseri Veri Kümesi')
Aktivasyon Fonksiyonu#
Perceptron’un çıktısının, ağırlık vektörü \(\vec{w}\) ile giriş vektörü \(\vec{x}\) arasındaki skaler çarpıma sabit bir bias terimi \(b\) eklenmesiyle elde edildiğini hatırlayalım.
Perceptron: \(y=w^Tx + b\)
Aktivasyon fonksiyonları, bu hesaplamanın ardından uygulanır.
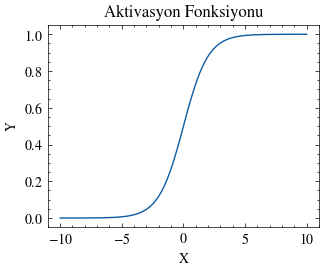
Sigmoid Fonksiyonu#
İkili sınıflandırma yapabilmek için çıktı değerini (0, 1) aralığında tutmak ve hangi sınıfa ait olduğuna dair bir olasılık üretmek isteriz. Sigmoid fonksiyonu bunun için oldukça uygundur.
\( \sigma(z) = \frac{1}{1+e^-z} \)
sigmoid = lambda x: 1 / (1 + np.exp(-x))
def plot(fx, x_min, x_max, points=100, title=""):
x = np.linspace(x_min, x_max, points)
y = fx(x)
fig, axes = plt.subplots()
axes.plot(x, y)
axes.set_xlabel("X")
axes.set_ylabel("Y")
axes.set_title("Aktivasyon Fonksiyonu")
x_min = -10
x_max = 10
points = 100
plot(sigmoid, x_min, x_max, points)
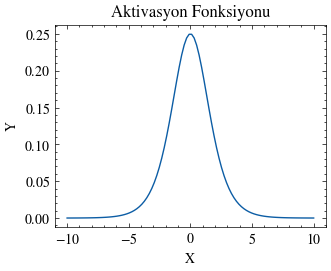
Sigmoid Fonksiyonunun Türevi#
Birazdan en uygun ağırlıkları bulmak için gradyan inişini kullanacağız. Bu yüzden önce sigmoid fonksiyonunun türevini hesaplayalım.
\( \begin{align*} \sigma^\prime &= \frac{\partial}{\partial z} \sigma(z) \\ &= \frac{\partial}{\partial z} (\frac{1}{1+e^{-z}}) \\ &= \frac{\partial}{\partial z} (1+e^{-z})^{-1}) \\ &= (-1)(1+e^{-z})^{-2}\frac{\partial}{\partial z}(1+e^{-z}) \\ &= (-1)(1+e^{-z})^{-2}(e^{-z})\frac{\partial}{\partial z}(-z) \\ &= (-1)(1+e^{-z})^{-2}(e^{-z})(-1) \\ &= \frac{e^{-z}}{(1+e^{-z})^{2}} \end{align*} \)
sigmoid_prime = lambda x: np.exp(-x) / np.power((1 + np.exp(-x)), 2)
plot(sigmoid_prime, x_min, x_max, points)
Autograd#
İsterseniz bir NumPy fonksiyonunun türevini almak için autograd da kullanabilirsiniz. PyTorch ve JAX de benzer otomatik türev alma mekanizmaları sunar.
# grad() differentiates scalar inputs
sigmoid_prime_grad = grad(sigmoid)
# egrad() differentiates vectorized inputs
sigmoid_prime_egrad = egrad(sigmoid)
x = np.linspace(x_min, x_max, points)
assert sigmoid_prime_grad(x[0]) == sigmoid_prime(x[0])
assert np.allclose(sigmoid_prime_egrad(x), sigmoid_prime(x))
plot(sigmoid_prime_egrad, x_min, x_max, points)
Kayıp Fonksiyonu#
Lojistik regresyonda ikili çapraz entropi kaybı kullanılır. Bu kayıp fonksiyonu, maksimum olabilirlik tahmininden türetilir.
İkili sınıflandırma modelinde, ilk sınıfa ait olma olasılığı; ağırlık vektörü \(\vec{w}\) ile giriş vektörü \(\vec{x}\) arasındaki skaler çarpıma bias terimi \(b\) eklendikten sonra sigmoid uygulanarak elde edilir. Diğer sınıfa ait olma olasılığı ise bunun 1’den çıkarılmasıdır.
\( P(Y=1 \mid \vec{x}; \vec{w}, b) = \sigma{(\vec{w} \cdot \vec{x} + b)} \)
\( P(Y=0 \mid \vec{x}; \vec{w}, b) = 1 - P(Y=1 \mid \vec{x}; \vec{w}, b) \)
Maksimum Olabilirlik Tahmini#
Maksimum olabilirlik tahmini, eğitim verisini gözleme olasılığını en büyük yapan ağırlık ve bias değerlerini bulur.
\(\vec{w}\) ve \(b\) cinsinden doğru ikili tahmin olasılığı aşağıdaki gibi yazılır. Bu ifade Bernoulli dağılımı olarak da düşünülebilir.
\( P(Y \mid \vec{x}; \vec{w}, b) = [\sigma{(\vec{w} \cdot \vec{x} + b)}]^{y} [1 - \sigma{(\vec{w} \cdot \vec{x} + b)}]^{1-y} \)
Eğitim verisinde \(n\) adet \(\vec{x_i}\) özelliği ve bunlara karşılık gelen \(y_i\) etiketleri varsa, toplam olasılık tüm örneklerin olasılıklarının çarpımı olarak yazılır. Bunu, mevcut ağırlık ve bias değerleri altında eğitim verisinin olabilirliği olarak düşünebilirsiniz.
\( P(Y \mid \vec{x_i}; \vec{w}, b) = \prod_{i=1}^{n} [\sigma{(\vec{w} \cdot \vec{x_i} + b)}]^{y_i} [1 - \sigma{(\vec{w} \cdot \vec{x_i} + b)}]^{1-y_i} \)
Amacımızın, toplam olabilirliği en büyük yapan en uygun \(\vec{w}\) ve \(b\) parametrelerini bulmak olduğunu unutmayın.
\( P(Y \mid \vec{x_i}; \vec{w}, b) = \max_{\vec{w}, b} \prod_{i=1}^{n} [\sigma{(\vec{w} \cdot \vec{x_i} + b)}]^{y_i} [1 - \sigma{(\vec{w} \cdot \vec{x_i} + b)}]^{1-y_i} \)
Lojistik regresyon modeli için en uygun ağırlık ve bias değerlerini bulmak amacıyla, optimizasyon problemlerini çözmekte kullanılan gradyan inişine başvururuz. Bunun için olabilirlik ifadesinin \(\vec{w}\) ve \(b\)’ye göre kısmi türevlerini almamız gerekir.
Ancak mevcut haliyle toplam olasılık çok sayıda çarpımdan oluşur. Çarpım kuralı nedeniyle türevler de oldukça karmaşık hale gelir. Bunu sadeleştirmek için olabilirliğin logaritmasını alırız; böylece çarpımlar toplamlara dönüşür.
\( \begin{align*} \ln(P(Y \mid \vec{x_i}; \vec{w}, b)) &= \max_{\vec{w}, b} \ln(\prod_{i=1}^{n} [\sigma{(\vec{w} \cdot \vec{x_i} + b)}]^{y_i} [1 - \sigma{(\vec{w} \cdot \vec{x_i} + b)}]^{1-y_i}) \\ &= \max_{\vec{w}, b} \sum_{i=1}^{n}[ \ln([\sigma{(\vec{w} \cdot \vec{x_i} + b)}]^{y_i} [1 - \sigma{(\vec{w} \cdot \vec{x_i} + b)}]^{1-y_i})] \\ &= \max_{\vec{w}, b} \sum_{i=1}^{n}[ \ln([\sigma{(\vec{w} \cdot \vec{x_i} + b)}]^{y_i}) + \ln([1 - \sigma{(\vec{w} \cdot \vec{x_i} + b)}]^{1-y_i})] \\ &= \max_{\vec{w}, b} \sum_{i=1}^{n}[ y_i \ln(\sigma{(\vec{w} \cdot \vec{x_i} + b)}) + (1-y_i) \ln(1 - \sigma{(\vec{w} \cdot \vec{x_i} + b)})] \\ \end{align*} \)
O halde, olabilirliğin negatif logaritmasını (yani yukarıdaki ifadeyi -1 ile çarparak) ikili çapraz entropi kaybı olarak tanımlarız. Ayrıca bunu örnek sayısına bölerek \(n\) örneğin ortalama kaybını elde ederiz.
\( \begin{align*} L(\vec{w}, b) = -\frac{1}{n} \sum_{i=1}^{n}[ y_i \ln(\sigma{(\vec{w} \cdot \vec{x_i} + b)}) + (1-y_i) \ln(1 - \sigma{(\vec{w} \cdot \vec{x_i} + b)})] \end{align*} \)
İkili Çapraz Entropi Kayıp Fonksiyonu#
\(\hat y = \sigma{(\vec{w} \cdot \vec{x} + b)} = \frac{1}{1+e^-(\vec{w} \cdot \vec{x} + b)}\) olduğunu hatırlayalım.
Kayıp hesabını sadeleştirmek için ifadeyi \(\hat y\) cinsinden yeniden yazalım:
\( \begin{align*} L(\hat y) &= -\frac{1}{n} \sum_{i=1}^{n} [y_i \ln(\hat y_i) + (1-y_i) \ln(1 - \hat y_i)] \end{align*} \)
def bce(y_true, y_pred):
return -np.sum(y_true * np.log(y_pred) + (1 - y_true) * np.log(1 - y_pred))
Kayıp Fonksiyonu: \(W\) ve \(B\) Cinsinden#
Kayıp fonksiyonunun \(\vec{w}\) ve \(b\)’ye göre kısmi türevini almadan önce, hesabı kolaylaştırmak için ifadeyi biraz sadeleştirelim.
\(\hat y = \sigma{(\vec{w} \cdot \vec{x} + b)} = \frac{1}{1+e^-(\vec{w} \cdot \vec{x} + b)}\)
\( \begin{align*} L(\vec{w}, b) &= -\frac{1}{n} \sum_{i=1}^{n}[ y_i \ln(\sigma{(\vec{w} \cdot \vec{x_i} + b)}) + (1-y_i) \ln(1 - \sigma{(\vec{w} \cdot \vec{x_i} + b)})] \\ &= -\frac{1}{n} \sum_{i=1}^{n}[ y_i \ln(\sigma{(\vec{w} \cdot \vec{x_i} + b)}) - y_i \ln(1 - \sigma{(\vec{w} \cdot \vec{x_i} + b)}) + \ln(1 - \sigma{(\vec{w} \cdot \vec{x_i} + b)})] \\ &= -\frac{1}{n} \sum_{i=1}^{n}[ y_i \ln(\frac{\sigma{(\vec{w} \cdot \vec{x_i} + b)}}{1 - \sigma{(\vec{w} \cdot \vec{x_i} + b)}}) + \ln(1 - \sigma{(\vec{w} \cdot \vec{x_i} + b)})] \\ &= -\frac{1}{n} \sum_{i=1}^{n}[ y_i \ln(\frac{\frac{1}{1+e^{-(\vec{w} \cdot \vec{x} + b)}}}{1 - \frac{1}{1+e^{-(\vec{w} \cdot \vec{x} + b)}}}) + \ln(1 - \frac{1}{1+e^{-(\vec{w} \cdot \vec{x} + b)}})] \\ &= -\frac{1}{n} \sum_{i=1}^{n} [y_i \ln(e^{\vec{w} \cdot \vec{x_i} + b}) + \ln(\frac{1}{1+e^{\vec{w} \cdot \vec{x_i} + b}})] \\ &= -\frac{1}{n} \sum_{i=1}^{n} [y_i (\vec{w} \cdot \vec{x_i} + b) - \ln(1+e^{\vec{w} \cdot \vec{x_i} + b})] \\ \end{align*} \)
Kayıp Fonksiyonunun Gradyanı#
Kayıp fonksiyonunun \(W\)’ye göre türevi:
\( \begin{align*} \nabla_{W} [L(\vec{w}, b)] &= \nabla_{W} [-\frac{1}{n} \sum_{i=1}^{n} [y_i (\vec{w} \cdot \vec{x_i} + b) - \ln(1+e^{\vec{w} \cdot \vec{x_i} + b})]] \\ &= -\frac{1}{n} \sum_{i=1}^{n} [y_i \nabla_{W} [\vec{w} \cdot \vec{x_i} + b] - \nabla_{W}[\ln(1+e^{\vec{w} \cdot \vec{x_i} + b})]] \\ &= -\frac{1}{n} \sum_{i=1}^{n} [y_i x_i - (\frac{1}{1+e^{\vec{w} \cdot \vec{x_i} + b}}) \nabla_{W}[1+e^{\vec{w} \cdot \vec{x_i} + b}]] \\ &= -\frac{1}{n} \sum_{i=1}^{n} [y_i x_i - (\frac{1}{1+e^{\vec{w} \cdot \vec{x_i} + b}}) (e^{\vec{w} \cdot \vec{x_i} + b})\nabla_{W}[\vec{w} \cdot \vec{x_i} + b]] \\ &= -\frac{1}{n} \sum_{i=1}^{n} [y_i x_i - (\frac{1}{1+e^{\vec{w} \cdot \vec{x_i} + b}}) (e^{\vec{w} \cdot \vec{x_i} + b})(x_i)] \\ &= -\frac{1}{n} \sum_{i=1}^{n} [y_i x_i - x_i(\frac{e^{\vec{w} \cdot \vec{x_i} + b}}{1+e^{\vec{w} \cdot \vec{x_i} + b}})] \\ &= -\frac{1}{n} \sum_{i=1}^{n} [y_i x_i - x_i(\frac{1}{1+e^{-(\vec{w} \cdot \vec{x_i} + b)}})] \\ &= -\frac{1}{n} \sum_{i=1}^{n} [y_i x_i - x_i\hat y_i] \\ &= \frac{1}{n} \sum_{i=1}^{n} [\hat y_i x_i - y_i x_i ] \\ &= \frac{1}{n} \sum_{i=1}^{n} [x_i (\hat y_i - y_i)] \\ \end{align*} \)
def bce_dw(x, y_true, y_pred):
return np.mean(x * (y_pred - y_true))
Kayıp fonksiyonunun \(b\)’ye göre türevi:
\( \begin{align*} \frac{\partial}{\partial b} [L(\vec{w}, b)] &= \frac{\partial}{\partial b} [-\frac{1}{n} \sum_{i=1}^{n} [y_i (\vec{w} \cdot \vec{x_i} + b) - \ln(1+e^{\vec{w} \cdot \vec{x_i} + b})]] \\ &= -\frac{1}{n} \sum_{i=1}^{n} [y_i \frac{\partial}{\partial b} [\vec{w} \cdot \vec{x_i} + b] - \frac{\partial}{\partial b}[\ln(1+e^{\vec{w} \cdot \vec{x_i} + b})]] \\ &= -\frac{1}{n} \sum_{i=1}^{n} [y_i (1) - (\frac{1}{1+e^{\vec{w} \cdot \vec{x_i} + b}}) \frac{\partial}{\partial b}[1+e^{\vec{w} \cdot \vec{x_i} + b}] ] \\ &= -\frac{1}{n} \sum_{i=1}^{n} [y_i - (\frac{1}{1+e^{\vec{w} \cdot \vec{x_i} + b}}) (e^{\vec{w} \cdot \vec{x_i} + b}) \frac{\partial}{\partial b}[\vec{w} \cdot \vec{x_i} + b]] \\ &= -\frac{1}{n} \sum_{i=1}^{n} [y_i - (\frac{1}{1+e^{\vec{w} \cdot \vec{x_i} + b}}) (e^{\vec{w} \cdot \vec{x_i} + b}) (1)] \\ &= -\frac{1}{n} \sum_{i=1}^{n} [y_i - (\frac{e^{\vec{w} \cdot \vec{x_i} + b}}{1+e^{\vec{w} \cdot \vec{x_i} + b}})] \\ &= -\frac{1}{n} \sum_{i=1}^{n} [y_i - (\frac{1}{1+e^-({\vec{w} \cdot \vec{x_i} + b})})] \\ &= -\frac{1}{n} \sum_{i=1}^{n} [y_i - \hat y_i] \\ &= \frac{1}{n} \sum_{i=1}^{n} (\hat y_i - y_i) \\ \end{align*} \)
def bce_db(y_true, y_pred):
return np.mean(y_pred - y_true)
Gradyan İnişi#
İkili çapraz entropi kaybının \(\vec{w}\) ve \(b\) açısından türevlerini bulduğumuza göre, gradyan inişi denklemleri şöyle yazılır:
Ağırlıklar \(\vec{w}\) için gradyan inişi:
\( \begin{align*} \vec{w} &= \vec{w} - \eta \nabla_{W} [L(\vec{w}, b)] \\ &= \vec{w} - \eta [\frac{1}{n} \sum_{i=1}^{n} [x_i (\hat y_i - y_i)]] \end{align*} \)
Bias terimi \(b\) için gradyan inişi:
\( \begin{align*} b &= b - \eta \frac{\partial}{\partial b} [L(\vec{w}, b)] \\ &= b - \eta [\frac{1}{n} \sum_{i=1}^{n} (\hat y_i - y_i)] \end{align*} \)
def gradient_descent(weights, x, bias, y_true, y_pred, learning_rate):
weights = weights - learning_rate * bce_dw(x, y_true, y_pred)
bias = bias - learning_rate * bce_db(y_true, y_pred)
return weights, bias
Grafik Fonksiyonları#
Görselleştirmeleri üretmek için yardımcı fonksiyonlar.
def create_plots():
fig, ax = plt.subplots(1, 3, figsize=(16 / 9.0 * 4, 4 * 1))
fig.suptitle("Lojistik Regresyon")
ax[0].set_xlabel("Epok", fontweight="normal")
ax[0].set_ylabel("Hata", fontweight="normal")
ax[0].set_title("İkili Çapraz Entropi Hatası")
ax[1].axis("off")
ax[2].axis("off")
ax[2] = fig.add_subplot(1, 2, 2, projection="3d")
ax[2].set_xlabel("X")
ax[2].set_ylabel("Y")
ax[2].set_zlabel("Z")
ax[2].set_title("Tahmin Olasılıkları")
ax[2].view_init(20, -35)
camera = Camera(fig)
return ax[0], ax[2], camera
def plot_graphs(
ax0,
ax1,
idx,
visible_mse,
mse_idx,
errors,
features,
labels,
predictions,
points_x,
points_y,
surface_predictions,
):
ax0.plot(
mse_idx[visible_mse][: idx + 1],
errors[visible_mse][: idx + 1],
color="red",
alpha=0.5,
)
# Plot Logistic Regression Tahminler
# Ground truth and training data
ground_truth_legend = ax1.scatter(
features[:, 0],
features[:, 1],
labels,
color="red",
alpha=0.5,
label="Gerçek Etiket",
)
# Logistic Regression Tahminler
predictions_legend = ax1.scatter(
features[:, 0],
features[:, 1],
predictions,
color="blue",
alpha=0.2,
label="Tahmin",
)
ax1.plot_surface(
points_x,
points_y,
surface_predictions.reshape(dims, dims),
color="blue",
alpha=0.2,
)
ax1.legend(
(ground_truth_legend, predictions_legend),
("Gerçek Etiket", "Tahminler"),
loc="upper left",
)
Modeli Eğitmek#
def fit(
w0, b0, features, labels, dims, epochs, learning_rate, optimizer, output_filename
):
mse_idx = np.arange(1, epochs + 1)
errors = np.full(epochs, -1)
ax0, ax1, camera = create_plots()
points = np.linspace(0, 1, dims)
points_x, points_y = np.meshgrid(points, points)
surface_points = np.column_stack((points_x.flatten(), points_y.flatten()))
weights = w0
bias = b0
for idx in range(epochs):
error = 0
predictions = np.array([])
surface_predictions = np.array([])
# fit the model on the training data
for x, y in zip(features, labels):
output = sigmoid(np.dot(weights, x) + bias)
predictions = np.append(predictions, output)
# Store Hata
error += bce(y, output)
# Gradyan İnişi
weights, bias = optimizer(weights, x, bias, y, output, learning_rate)
# error /= len(features)
# Visualization
if (
idx < 5
or (idx < 15 and idx % 5 == 0)
or (idx <= 50 and idx % 25 == 0)
or (idx <= 1000 and idx % 200 == 0)
or idx % 500 == 0
):
for surface_point in surface_points:
output = sigmoid(np.dot(weights, surface_point) + bias)
surface_predictions = np.append(surface_predictions, output)
print(f"epok: {idx:>4}, BCE: {round(error, 2)}")
# Plot BCE
errors[idx] = error
visible_mse = errors != -1
plot_graphs(
ax0,
ax1,
idx,
visible_mse,
mse_idx,
errors,
features,
labels,
predictions,
points_x,
points_y,
surface_predictions,
)
camera.snap()
animation = camera.animate()
animation.save(output_filename, writer="pillow")
epochs = 5001
learning_rate = 0.0005
dims = 10
w0 = np.random.rand(X[0].shape[0])
b0 = np.random.rand()
output_filename = "logistic_regression.gif"
fit(w0, b0, X, Y, dims, epochs, learning_rate, gradient_descent, output_filename)
epok: 0, BCE: 444.23
epok: 1, BCE: 438.52
epok: 2, BCE: 433.32
epok: 3, BCE: 428.58
epok: 4, BCE: 424.25
epok: 5, BCE: 420.28
epok: 10, BCE: 404.5
epok: 25, BCE: 375.53
epok: 50, BCE: 341.83
epok: 200, BCE: 231.95
epok: 400, BCE: 176.56
epok: 500, BCE: 161.66
epok: 600, BCE: 150.72
epok: 800, BCE: 135.71
epok: 1000, BCE: 125.86
epok: 1500, BCE: 111.57
epok: 2000, BCE: 103.85
epok: 2500, BCE: 99.03
epok: 3000, BCE: 95.75
epok: 3500, BCE: 93.39
epok: 4000, BCE: 91.61
epok: 4500, BCE: 90.24
epok: 5000, BCE: 89.16
Image(filename=output_filename)